Описание
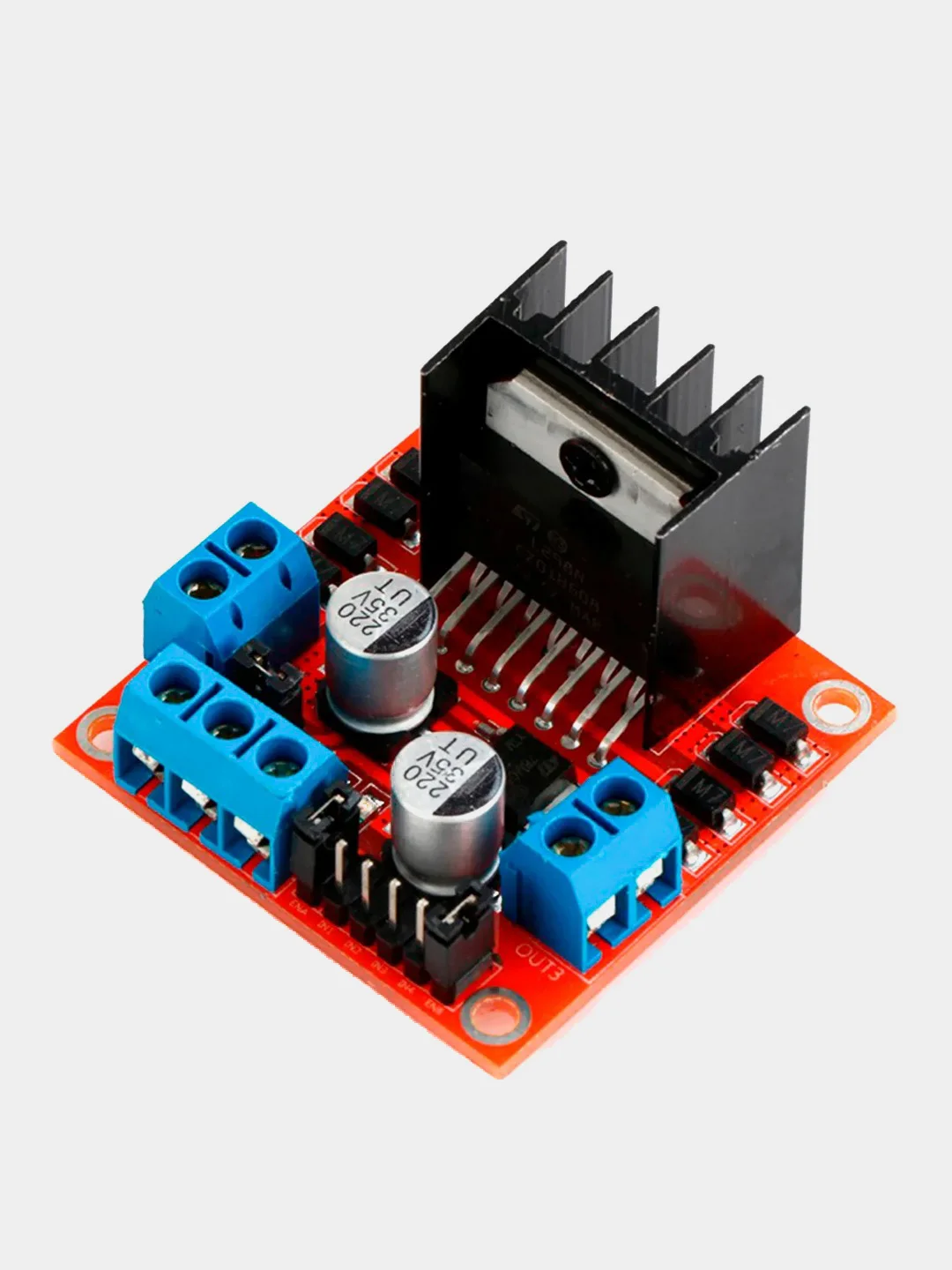
Драйвер L298N используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.
OUT1 и OUT2 – разъёмы для подключения первого щёточного двигателя или первой обмотки шагового двигателя;
OUT3 и OUT4 – разъёмы для подключения второго щёточного двигателя или второй обмотки шагового двигателя;
VSS – вход для питания двигателей (максимальный уровень +35V);
GND – общий провод (не забываем соединить с аналогичным входом Arduino!!!);
Vs – вход для питания логики +5V. Через него непосредственно запитывается сама микросхема L298N. Есть ещё второй способ питания, при котором 5V для L298N берётся от встроенного в модуль стабилизатора напряжения. В таком случае на разъём подаётся только питание для двигателей (Vss), контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.
IN1, IN2 – контакты управления первым щёточным двигателем или первой обмоткой шагового двигателя.
IN3, IN4 – контакты управления вторым щёточным двигателем или второй обмоткой шагового двигателя.
ENA, ENB – контакты для активации/деактивации первого и второго двигателей или соответствующих обмоток ШД. Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль – запрещает. Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал. Для работы с шаговым двигателям, как правило, на эти контакты ставят перемычки, обеспечивающие постоянную подтяжку к +5V.