Описание
Matek F405-WING v2 Полётный Контроллер
Технические характеристики FC:
- MCU: STM32F405RGT6, 168 МГц, 1 МБ Flash
- IMU: ICM42688-P
- Барометр: DPS310
- OSD: AT7456E
- Черный ящик: Слот для карт памяти MicroSD
- Порты: 6x UART, 1x Softserial_Tx (только INAV)
- PWM выходы: 10x
- I2C порты: 2x
- ADC входы: 3x (VBAT, ток, RSSI)
- Инвертор: встроенный для входа SBUS
- USB порт: Type-C (USB2.0)
Прошивка FC:
- ArduPilot: MatekF405-Wing (ArduPlane 4.4 или новее)
- INAV: MATEKF405SE (INAV 6.0 или новее)
PDB:
- Диапазон входного напряжения: 930 В (36S LiPo) с защитой от перегрева
- Датчик тока: 220 А, АЦП 3,3 В (шкала INAV 150, ArduPilot 66,7 А/В)
- Чувствительный резистор: 100A непрерывный, 220A пиковый
- Делитель напряжения батареи: 1K:10K (шкала 1100 в INAV, BATT_VOLT_MULT 11.0 в ArduPilot)
BEC 5V выход:
- Назначение: Полётный контроллер, приемник, OSD, камера, зуммер, LED лента 2812, GPS модуль, датчик воздушной скорости
- Непрерывный ток: 2 А
BEC 9V /12V выход:
- Назначение: Видео передатчик, камера, подвес и т.д.
- Непрерывный ток: 2 А
- Опция 12V с перемычкой:
- Для стабильного выхода 9V/12V, входное напряжение должно быть > выходного напряжения +1В
BEC Vx выход:
- Назначение: Сервоприводы
- Регулируемое напряжение: По умолчанию 5В, опции 6В или 7.2В
- Непрерывный ток: 5 А, пиковый 6 А
- Для стабильного выхода Vx, входное напряжение должно быть > Vx напряжения +1В
BEC 3.3V выход:
- Назначение: Внешние 3.3V устройства
- Линейный регулятор:
- Непрерывный ток: 200 мА
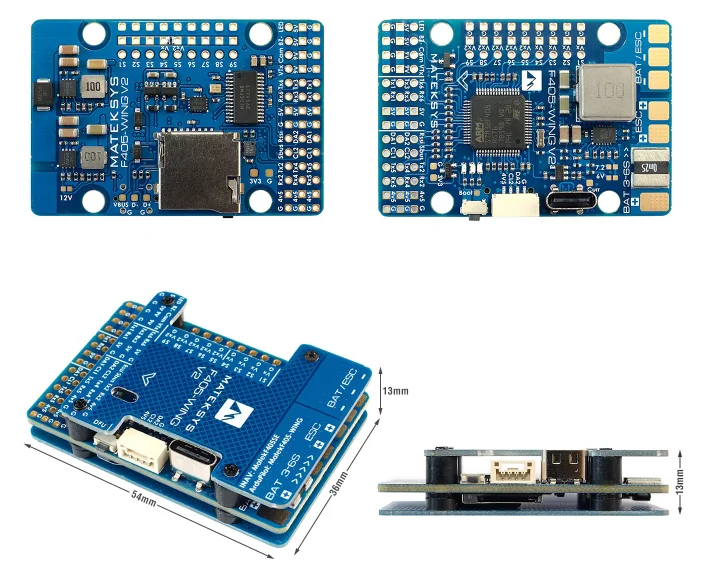
Физические характеристики:
- Монтаж: 30.5 x 30.5 мм, Φ4 мм с резиновыми втулками Φ3 мм
- Размеры: 54 x 36 x 13 мм
- Вес: 25 г
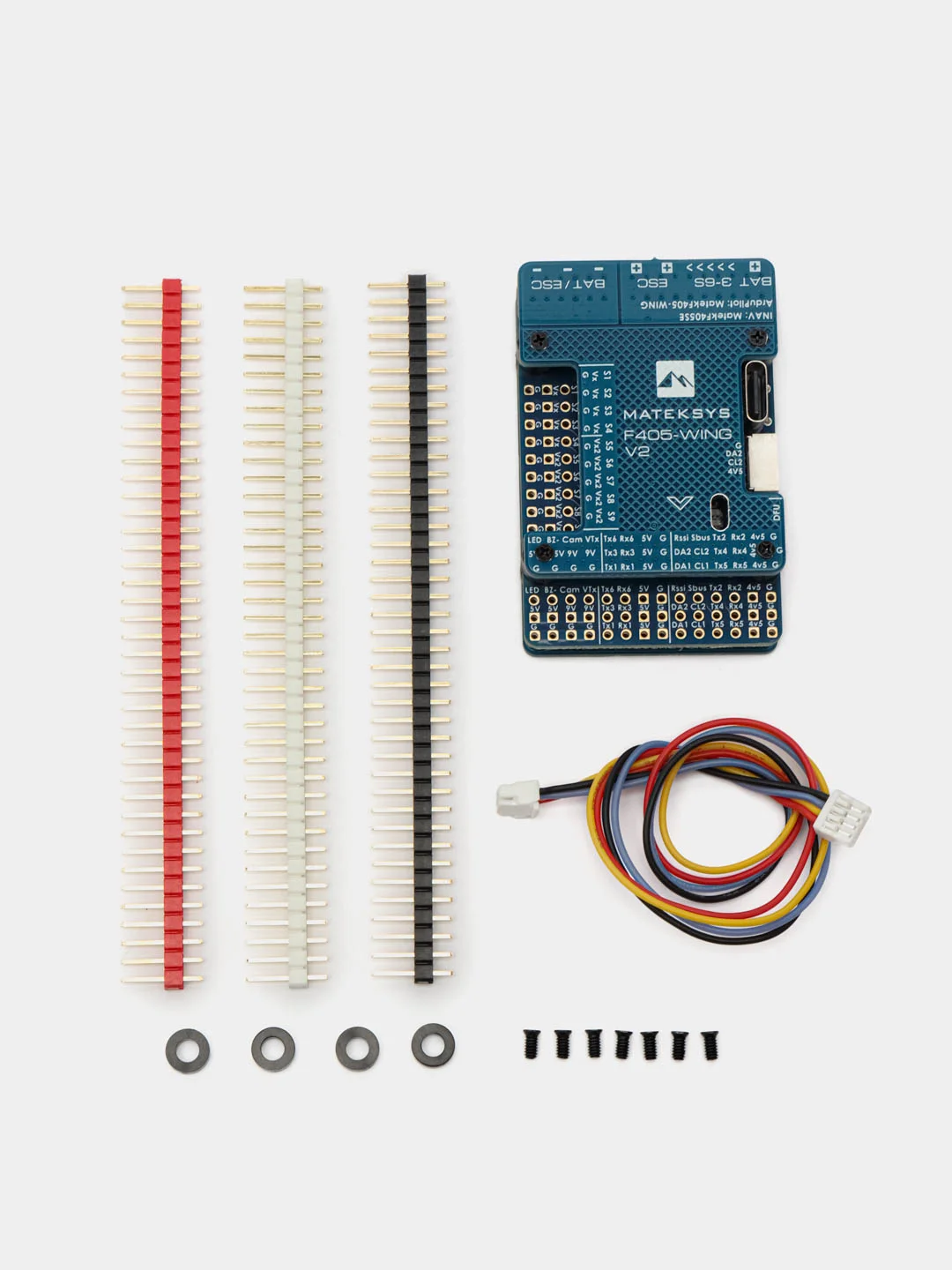
Комплектация:
- Полётный контроллер Matek F405-WING v2 - 1 шт.
- Кабель JST-GH-4P (20 см) для I2C порта - 1 шт.
- Контакты Dupont 2.54 (плата поставляется в распаянном виде)
Примечания для INAV:
- Прошивка INAV “MATEKF405SE” должна быть версии 6.0.0 или новее.
- Шкала датчика тока: 150
- Контактные площадки Vx2 на S5~S9 рейках - "мертвые". Если питать сервоприводы через встроенный Vx BEC, соедините Vx2 с Vx каплей олова. При использовании внешнего BEC оставьте разрыв, можно подключить внешний BEC к любой паре Vx2/G.
- Softserial_tx1 включен по умолчанию на Tx2 для телеметрии Frsky SmartPort. При использовании приёмника CRSF (TBS, ELRS и т.д.) отключите Softserial в конфигураторе INAV.
- Датчик воздушной скорости MS4525 работает только на шине I2C2.
Примечания для ArduPilot:
- Прошивка ArduPlane “MatekF405-WING” должна быть версии 4.4.0 или новее.
- Шкала датчика тока: 66.7
- Используйте активный 5V зуммер на контактах “Buz-” и 5V, тональный сигнал не поддерживается.
- Контактные площадки Vx2 на S5~S9 рейках - "мертвые". Если питать сервоприводы через встроенный Vx BEC, соедините Vx2 с Vx каплей олова. При использовании внешнего BEC оставьте разрыв, можно подключить внешний BEC к любой паре Vx2/G.
- Для FPort или SmartPort телеметрии требуется неискаженный (взломанный) S.Port сигнал.
- Для передачи высокоскоростных данных (например, 921600 бод) используйте USART1 (Serial1).